玉環雙山機械有限公司
Yuhuan Shuangshan Machinery Co. Ltd.為您提供全方面服務0576-81755168153 5567 8921全國24小時服務電話

玉環雙山機械有限公司
Yuhuan Shuangshan Machinery Co. Ltd.
玉環雙山機械有限公司
手機:15355678921
電話:0576-81755168
傳真:0576-87119393
郵箱:yhzytools@163.com
地址:浙江省臺州市玉環市清港工業園區
時間:2019-08-24 02:59:29??瀏覽次數:2361
機械手的結構組成主要包括執行機構、驅動系統、控制系統以及位置檢測裝置,如圖1.1。
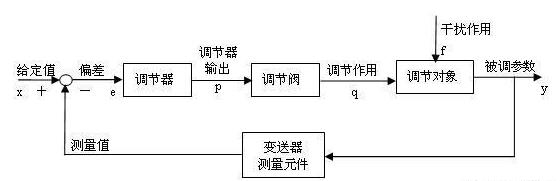
圖1.1 機械手組成圖
(1)執行機構,主要包含手部、手腕、手臂和立柱等,如圖1.2。手主要與物品接觸,夾持或吸附物品,握手由手指(或爪)和力傳遞機構組成。吸附式是通過真空裝置和橡膠對零件進行真空吸附;手腕是連接手和手臂的部分;臂支持所捕獲的物體、手和手腕;柱是機械手執行器的支撐部分,其他部件在柱上,可以實現機械手的旋轉和手臂的上下擴張。
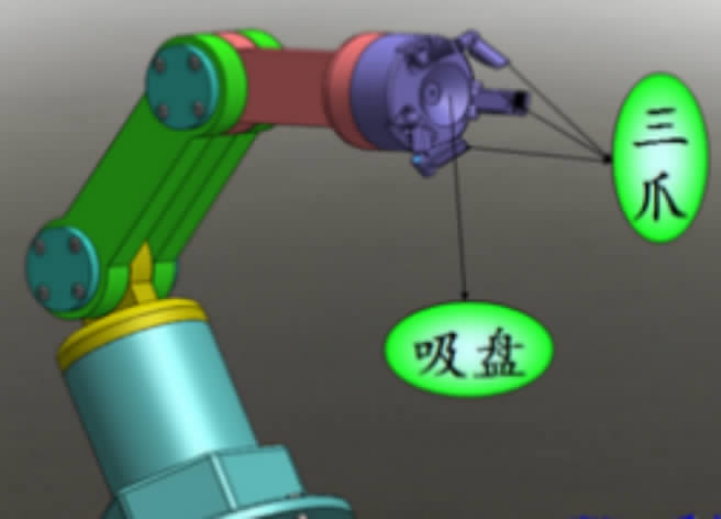
圖1.2 機械手執行機構
(2)驅動系統,它是機械手的動力裝置,是執行機構運動的基礎。機械手的設計包括液壓傳動、氣動傳動和機械傳動。
(3)控制系統,該系統是一個控制機器人的系統,主要通過驅動系統來控制機械手。它一般由程序系統和定位系統組成。定位系統是機械手移動到一定位置的控制裝置。該程序系統具有機械手的運動順序、運動軌跡、運動速度和時間等控制指令。
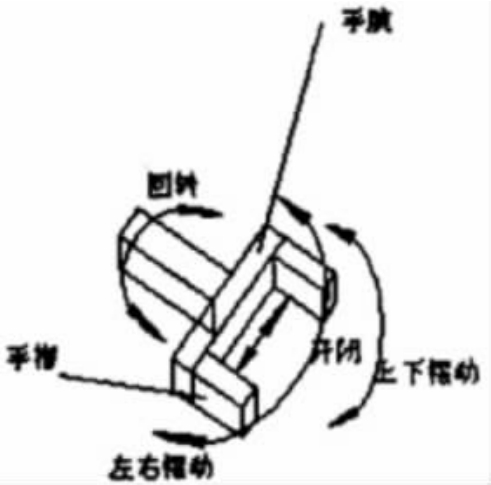
圖1.3 機械手運動示意圖
在設計機械手時,機械手的運動形式和坐標是非常重要的。機械手的坐標系是直角坐標、圓柱坐標、球坐標和關節.這些坐標系提升,收縮和旋轉機械手。通過這些坐標系和機械手的自由度,最終實現了機械手的運動,如圖1.3。
在機械手的設計中,一般采用氣動驅動,氣動成本低,在驅動裝置的設計中,氣缸的設計是最重要的,氣缸的受力既要滿足機械手的夾緊力,又要滿足復合制造成本低的要求,氣缸屬于單向作用缸。根據力平衡原理,單向作用缸活塞桿的輸出推力必須克服彈簧的反作用力和活塞桿工作時的總阻力,其公式為:
式中:F1-活塞桿上的推力,N
Ft-彈簧反作用力,N
Fz-氣缸工作時的總阻力,N
P-氣缸工作壓力,Pa
D—氣缸直徑。
機械手的驅動方式有以下幾種:
(1)液壓驅動機械手,這種機械手具有抓取物重量大、手握力大、結構緊湊、運動速度快等特點,但其缺點是容易發生漏油,不能在高溫或低溫環境下工作;
(2) 氣壓驅動機械手,通過壓縮空氣壓力驅動執行器的運動。該驅動方式的壓力相對較低,但生產成本低,結構簡單,但由于壓力低,機械手的運動速度較低;
(3) 電動傳動機械手,這種方式是通過電機驅動機械手,電機可以是感應電機、直線電機或功率步進電機,不需要這種中間傳動裝置,因此機械結構簡單。其中,直線電機機械手具有運動速度快、行程長、維護和使用方便等優點。
在機械手的設計中,主要的結構和硬件是非常重要的。例如,在設計機械手座椅時,需要有兩個電機來驅動,一個是驅動機械手旋轉,另一個是在機械手移動時驅動機械手。在設計機械手關節時,必須考慮齒輪之間的功率傳遞,這些設計內容是機械手設計的主要方面。

玉環雙山機械有限公司?備案號:浙ICP備14026957號-2
電話:0576-81755168?傳真:0576-87119393
郵箱:yhzytools@163.com
地址:浙江省臺州市玉環市清港工業園區
浙ICP備14026957號-2


