玉環雙山機械有限公司
Yuhuan Shuangshan Machinery Co. Ltd.為您提供全方面服務0576-81755168153 5567 8921全國24小時服務電話

玉環雙山機械有限公司
Yuhuan Shuangshan Machinery Co. Ltd.
玉環雙山機械有限公司
手機:15355678921
電話:0576-81755168
傳真:0576-87119393
郵箱:yhzytools@163.com
地址:浙江省臺州市玉環市清港工業園區
時間:2019-10-09 11:02:11??瀏覽次數:2381
利用UG軟件強大的建模功能,對所設計的鍛造機械手進行三維實體建模,然后根據實際設計要求,通過UG和ADAMS良好的數據接口,將模型數據直接導入ADAMS。在此基礎上進行了運動仿真,研究了各機構的運動,并對各關節的角位移、角速度和角加速度的變化進行了測量,驗證了設計的合理性。
在保證鍛造機械實現功能的前提下,首先對其三維實體模型進行了簡化,如圖1所示。
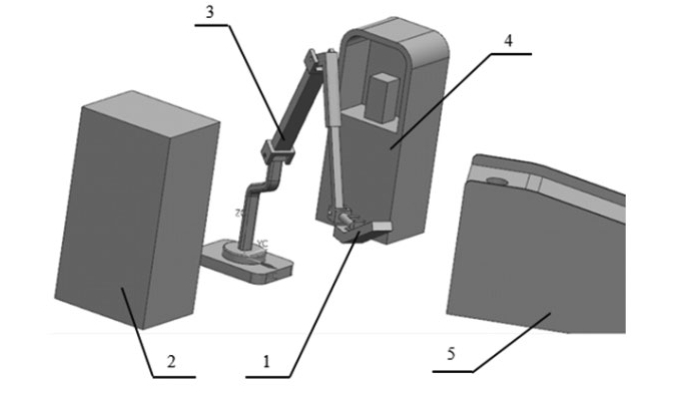
圖1 基于UG軟件的機械手簡化三維模型
注:1、工件輸入帶;2、鍛造臺 1;3、機械手;4、鍛造臺 2;5、工件輸出帶
然后,將三維模型導入到ADAMS中,添加相應的運動副約束和驅動約束,如圖2所示。
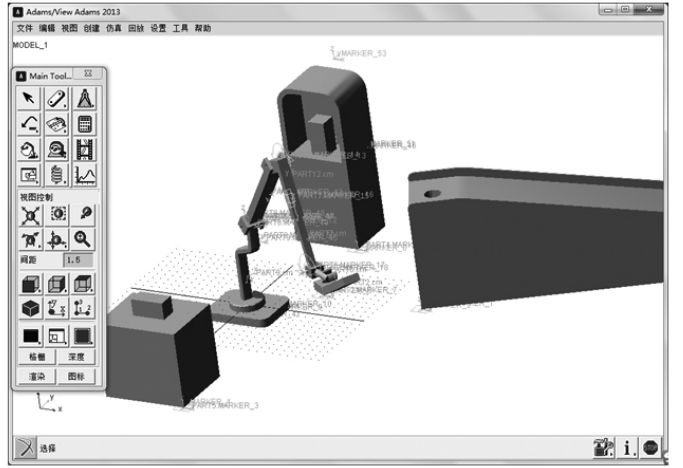
圖2 ADAMS環境下的鍛造機械手仿真模型
最后得出各個關節的角位移、角速度和角加速度的變化曲線分別如圖3,圖4和圖5所示。
通過觀察各個關節的角位移、角速度和角加速度的變化曲線可以看出,各關節的角位移、角加速度、角加速度平穩,驗證了所設計的五自由度送料機械手的合理性。

圖3 各旋轉關節角位移變化曲線

圖4 各旋轉關節角速度變化曲線

圖5 各旋轉關節角加速度變化曲線
結合工業自動鍛造管道的應用對象,選擇了機械手實現的功能。首先對鍛造機械手的具體結構進行了建模和虛擬裝配,并對部分關鍵部件的強度進行了校核。然后利用ADAMS軟件對機械手模型進行了運動仿真,生成了機器人的角位移、角速度和角加速度曲線。通過對各曲線的觀測,驗證了機械手的合理性。為下一步機械手的智能控制提供了一定的參考。

玉環雙山機械有限公司?備案號:浙ICP備14026957號-2
電話:0576-81755168?傳真:0576-87119393
郵箱:yhzytools@163.com
地址:浙江省臺州市玉環市清港工業園區
浙ICP備14026957號-2


